A Simple Jordan Canonical Form Algorithm
This document is intended for anyone who has been exposed to a second course in
linear algebra and who has been mystified by the usual lengthy treatments of
the Jordan canonical form and who simply wants an algorithm which can be
implemented by an exact arithmetic matrix calculator such as my
CMAT. We omit proofs and present such an algorithm for finding a nonsingular matrix
P such that P-1AP=JA, the Jordan canonical form
of A. (Proofs can be found in my 1991 MP274 lecture notes.)
Motivation
Let A be an n x n matrix over a field F and let the
characteristic polynomial chA(x) split completely as a
product of linear factors over F.
Let c be an eigenvalue of A having algebraic multiplicity
a and geometric multiplicity g.
Then A is similar to a direct sum of elementary Jordan
matrices; that is matrices Je(c), with c on the
diagonal, 1 on the subdiagonal and 0 elsewhere.
Let B = A - cIn.
Also let N(Bh) stand for the null space of
Bh. Then N(B) and N(Ba) are
the eigenspace and generalized eigenspace of A, corresponding to the
eigenvalue c.
Let nh=dim(N(Bh)). Then
g=n1 <= na=a. If g=a for all
eigenvalues, then JA is diagonal and there are no difficulties.
However if g < a, the situation is more complicated.
Our aim is to choose a basis for N(B) having the form
Be1-1X1, . . . ,
Beg-1Xg, (1)
where e1>= · · · > eg>=1
and e1+ · · · +eg=a.
For then the following generalized eigenvectors:
X1, BX1, . . . , Be1-1X1;
·
·
·
Xg, BXg, . . . , Beg-1Xg
will together form a basis for the generalized eigenspace
N(Ba). (See for example either the aforementioned MP274 notes or Lemma, p. 308, Linear Algebra, S.H. Friedberg, A.J. Insel, L.E. Spence, Prentice-Hall 1979.)
Then if Pc is the matrix whose columns are formed from the above list, we have
APc = Pcdiag(Je1(c), . . . , Jeg(c)).
We then let P be the result
of juxtaposing the Pc for the distinct eigenvalues. Then
P will be a nonsingular n x n matrix and P-1AP=JA.
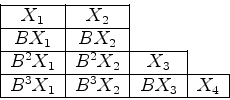
It helps to visualize the generalized eigenvectors in the following
tabular form:
If e1,...ek are the exponents
>= h, the vectors Be1-1X1, . . . , Bek-1Xk, can be shown to form a basis
for Nh, the intersection of C(Bh-1)
(the column space of Bh-1) and the eigenspace N(B).
In fact k = nh - nh-1.
The numbers e1, . . . , eg are called the
Segre characteristic for the eigenvalue c and form a
"vertical" partition of the algebraic multiplicity a.
The numbers nh increase strictly and then become equal:
n1<· · · < nb = · · · = na = a.
Here b=e1.
The numbers µh = nh - nh-1
decrease monotonically:
µ1 = n1>=· · ·
>= µb
and are called the
Weyr characteristic for the eigenvalue c and form a
"horizontal" partition of a.
We remark that the vectors BjXi,i=1,...,g,
j=0,...,ei-1, form a basis for N(Bh).
The construction
The above discussion shows that the subspaces Nh hold the key to the construction of the basis (1). We start with a basis for
Nb and extend to bases of the successive distinct
Nh, until a basis is obtained for N1 of
the form (1). The process is facilitated by the observation that
Nh = < Bh-1Y1, . . . , Bh-1Yr >,
if Y1, . . . , Yr is a basis for
N(Bh). We also make use of the "Left-To-Right" algorithm, which selects a basis from a list of spanning vectors.
An example
Let chA(x)=x11. Also suppose that
n1 = 4,
n2 = 7,
n3 = 9,
n4 = 11.
Then
µ1 = n1 = 4,
µ2 = n2 - n1 = 3,
µ3 = n3 - n2 = 2,
µ4 = n4 - n3 = 2.
Also B=A and our table of generalized eigenvectors is
- A basis for N4:
- N(B4) = <Y1, . . . ,
Y11>
and hence N4=
< B3Y1, . . . ,
B3Y11>.
The Left-To-Right algorithm will give:
N4=
<
B3X1, B3X2>.
- A basis for N2:
- N(B2) = <Z1, . . . ,
Z7>, so
N2=
< BZ1, . . . ,
BZ7> =
< B3X1, B3X2,
BZ1, . . . ,
BZ7>.
The Left-To-Right algorithm gives:
N2=
< B3X1, B3X2,
BX3>.
- A basis for N1:
- N(B) =
<W1, . . . ,
W4>
=
< B3X1, B3X2,
BX3,
W1, . . . ,
W4>.
The Left-To-Right algorithm gives:
N(B) = < B3X1, B3X2,
BX3,
X4
>.
Then P = [
X1|
BX1|
B2X1|
B3X1|
X2|
BX2|
B2X2|
B3X2|
X3|
BX3|
X4] has the property that
P-1AP = diag(J4(0),
J4(0),
J2(0),
J1(0)).
Added 27th June 2007: The book Matrix Theory by Robert Piziak and Patrick L. Odell, Chapman and Hall/CRC Press 2007, also presents an approach to the Jordan canonical form via the subspaces Nh on pages 389-429.
Last modified 28th May 2021